- » Антропология
- » Археология
- » Архитектура
- » Астрономия
- » Библиотековедение
- » Биология
- » Биотехнологии
- » Ботаника
- » Ветеринария
- » Военные науки
- » География
- » Геология
- » Журналистика
- » За горизонтом современной науки
- » Зоология
- » Информационные технологии
- » Искусствоведение
- » История
- » Культурология
- » Лингвистика
- » Литература
- » Маркетинг
- » Математика
- » Машиностроение
- » Медицина
- » Менеджмент
- » Методика преподавания
- » Музыковедение
- » Нанотехнологии
- » Науки о Земле
- » Образование
- » Оптика
- » Педагогика
- » Политология
- » Правоведение
- » Психология
- » Регионоведение
- » Религиоведение
- » Сельское хозяйство
- » Социология
- » Спорт
- » Строительство
- » Телекоммуникации
- » Техника
- » Туризм
- » Управление и организация
- » Управление инновациями
- » Фармацевтика
- » Физика
- » Физическая культура
- » Филология
- » Философия
- » Химия
- » Экология
- » Экономика
- » Электроника
- » Электротехника
- » Юриспруденция
Разделы: Машиностроение
Размещена 25.03.2021. Последняя правка: 24.03.2021.
Просмотров - 1038
Моделирование свободного движения четырехколесных кранов мостового типа с раздельным приводом. Часть первая - установившееся движение
Поликарпов Юрий Валентиновичктн, доцент
Пенсионер
доцент
УДК 621.874
Введение. Проблема повышения срока службы колес мостовых кранов и рельсов, снижения знакопеременных нагрузок на металлические конструкции крана и сооружений возникла более ста лет тому назад и до сих пор не имеет должного решения. Основная причина, приводящая к износу и нагрузкам, - движение моста с перекосом относительно рельсов или «забегание» одной из его сторон относительно другой. При этом колесные реборды вступают в контакт с боковыми сторонами рельсов, вызывая появление нагрузок и износа.
Актуальность. В последнее время наметилась тенденция к установке на кранах замкнутых систем автоматического управления их электроприводом, включающих функцию устранения перекоса моста [1]. Они обеспечивают такое движение крана, при котором реборды практически не вступают в контакт с рельсами устраняя износ реборд и снижая нагрузки на металлоконструкции. Однако, это очень затратное решение как при внедрении, так и в эксплуатации [Там же].
Цели и задачи. Продолжение ранее проводившихся работ по исследованию закономерностей свободного движения кранов до наступления контакта реборд и рельсов [2, 3]. Одна из задач исследования — выяснение наиболее значимых причин появления перекоса моста с целью последующего их устранения.
Научная новизна. Принципы построения математической модели, учитывающей упругие скольжения колес. Обоснование малой значимости ряда потенциальных причин перекоса моста.
Основное содержание. Первым исследователем причин перекоса применительно к кранам с раздельным приводом был Балашов В.П. Результаты его исследований опубликованы в работе [4], вышедшей в 1959 г. В ней перекосам крана посвящена глава, где приведен перечень возможных причин их появления, включающий: разность диаметров ведущих колес, проскальзывание или пробуксовывание одного из ведущих колес, различные скорости вращения электродвигателей вследствие различной их загрузки или различных жесткостей их характеристик, перекосы осей ведущих и ведомых колес в горизонтальной плоскости. Последующий материал содержит описание механизмов воздействия на основе представлений и математического аппарата того времени, используемого при решении технических задач.Этот перечень причин, дополненный смещением грузовой тележки с оси крана при поперечном перемещении грузов, до сих пор воспроизводится во многих источниках[1, 5, 6, 7,].
За последующие годы произошло некоторое переосмысление механизма взаимодействия крановых колес с рельсами и в обиход были введены понятия о продольном и поперечном упругих скольжениях колес относительно рельсов, которые не учитывались в [4]. Кроме того, получили широкое развитие методы математического моделирования, которые позволяют находить решения задач, ранее казавшихся неразрешимыми. Это позволяет взглянуть на проблему под несколько иным углом зрения.
Известно [3], что относительные перекосы колес, которые являются следствием погрешностей изготовления и монтажа кранов, оказывают значимое влияние на перекосы кранов в процессе движения. Стандартом определены допускаемые их величины в пределах ±0,0004 рад относительно базы измерений. При этом максимальный их относительный перекос может составить 0,0008 рад. Однако, на практике требования стандарта выполняются далеко не всегда в связи со сложностью достижения требуемого результата.
С точки зрения кинематики поперечное разно направленное скольжение передних и задних колес при движении крана приводит к тем же результатам, что и их перекосы. То есть при равных значениях относительного перекоса и относительной скорости поперечного скольжения колес кран движется по дуге окружности одного и того же радиуса. Поэтому значимость прочих факторов будем оценивать в сравнении с перекосами колес.
Нахождение зависимости между скоростями упругого скольжения и силовыми факторами процесса качения – это контактная задача теории упругости. Существует инженерная методика ее решения для крановых колес [8]. Она положена в основу модели.
Исходными данными для расчета являются: радиус колеса; радиус скругления головки рельса; коэффициент сцепления колеса и рельса; нормальная нагрузка на колесе. Расчет в ней ведется численным методом от известных скоростей упругих скольжений к соответствующим им значениям сил. Поскольку в нашем случае и те, и другие неизвестны, то необходимо найти такие их значения, при которых выполняются условия силового равновесия и неразрывности связей. В такой постановке задача решается с использованием методов нелинейного программирования, причем в связи с небольшим числом изменяемых величин и ограничений достаточно встроенных средств пакета MS Office Calc.
В начале рассмотрим движение крана при действии таких возможных причин перекоса моста, как различия сил сопротивления движению и механических характеристик двигателей. Считаем, что колеса установлены без перекосов. В этих случаях возможным вариантом перераспределения нагрузки является возрастание сил сопротивления движению с одной стороны пролета крана и уменьшение сил сопротивления с другой его стороны при неизменной сумме этих сил. При этом, с увеличением силы сопротивления скорость первого двигателя должна падать, а скорость второго возрастать с ее уменьшением. Это худший случай для перекоса моста.
Расчетная схема действия нагрузок на кран приведена на рисунке 1. Колеса К1 и К4 приводные На схеме принято, что сопротивление движению левой стороны крана больше, чем правой. Поперечные нагрузки не изменятся, если увеличится не сопротивление движению левой стороны, а равнозначно возрастетдвижущая сила правого двигателя, и значит можно ограничиться анализом первого из вариантов, а результат применим и ко второму.
Рисунок 1. Схема действия нагрузок на кран.
Принимаем допущения: рельсы абсолютно ровные и жесткие; мост представляет собой не деформируемую конструкцию; груз не раскачивается. В качестве объекта для анализа принимаем мостовой кран со следующими техническими данными:
Грузоподъемность на крюке, кг 32000; Масса тележки с траверсой, кг 31200;
Пролет, м 28; Диаметр колеса, мм 710;
База, м 5; Скорость передвижения, м/с 1,67;
Масса моста, кг 114200; Проектное ускорение, м/с2 0,335.
Для решения задачи используем средство «Поиск решения» из Excel. Начальные значения приведенных к колесам сил сопротивления движению каждойстороныкрана принимаем равными половине общих силсопротивления передвижению, в которыхне учитываемтрение реборд. Это отвечает ситуации одинаковых сил сопротивления движению. Затем вводим коэффициенты, задающие степень различия этих сил. Сумма коэффициентов всегда равна двум. Коэффициент сил сопротивления левойстороны изменяем от 1 до 2,4. при этом соответствующий коэффициент правойстороны изменяется от 1 до -0,4 . Коэффициент жесткости механических характеристик двигателей принимаем равным 0,1. Основные результаты моделирования приведены в таблице 1.
|
КоэфСопрЛевСтор |
1 |
1,2 |
1,4 |
1,6 |
1,8 |
2 |
2,2 |
|
КоэфСопрПраСтор |
1 |
0,8 |
0,6 |
0,4 |
0,2 |
0,0 |
-0,2 |
|
ОтнСкорПродСкК4 |
-9,0E-05 |
-9,0E-05 |
-9,0E-05 |
-8,9E-05 |
-8,9E-05 |
-8,9E-05 |
-8,9E-05 |
|
ОтнСкорПродСкК1 |
-9,0E-05 |
-9,1E-05 |
-9,2E-05 |
-9,3E-05 |
-9,4E-05 |
-9,6E-05 |
-9,7E-05 |
|
ОтнСкорПопСкОсиК2К3 |
0 |
-5,9E-05 |
-1,2E-04 |
-1,8E-04 |
-2,4E-04 |
-3,0E-04 |
-3,6E-04 |
|
ОтнСкорПопСкОсиК1К4 |
0 |
5,9E-05 |
1,2E-04 |
1,8E-04 |
2,4E-04 |
3,0E-04 |
3,6E-04 |
|
ОтнСкорПерекоса |
0 |
1,2E-04 |
2,4E-04 |
3,6E-04 |
4,8E-04 |
6,0E-04 |
7,3E-04 |
|
РазнИзмСкорК4иК1 |
0 |
6,6E-04 |
1,3E-03 |
2,0E-03 |
2,7E-03 |
3,4E-03 |
4,1E-03 |
|
Fпрод К1, Н |
3262,5 |
3283,9 |
3305 |
3326 |
3349 |
3371 |
3394 |
|
Fпрод К4,Н |
3262,5 |
3241,0 |
3218 |
3196 |
3174 |
3152 |
3129 |
|
F попер К1, Н |
0 |
-1766,8 |
-3 532 |
-5 297 |
-7061 |
-8824 |
-10587 |
|
F попер К2, Н |
0 |
1766,5 |
3533 |
5298 |
7063 |
8826 |
10589 |
|
F попер К3, Н |
0 |
1766,5 |
3533 |
5298 |
7063 |
8826 |
10589 |
|
F попер К4, Н |
0 |
-1767,1 |
-3533 |
-5298 |
-7063 |
-8827 |
-10590 |
|
РазнFпрод К1,К4, Н |
0 |
42,8 |
86,2 |
130,0 |
174,5 |
219,6 |
265,4 |
|
ДоляМдв |
0 |
3,28% |
3,30% |
3,32% |
3,34% |
3,37% |
3,39% |
Анализ показывает, что результаты не противоречивы,условия равновесия выполнены достаточно строго и имеются основания считать, что модель адекватна натуре.
Как видно из табл.1, строка «ОтнСкорПерекоса», при отношении сил сопротивления по разные стороны крана 1,5 (коэффициенты 1.2 и 0,8), относительная скорость перекоса крана составляет 1,2Е -4, что во много раз меньше допустимого относительного перекоса колес, с которым она сравнивается только при отключении или выходе из строя одного из двигателей(коэффициенты 2 и 0). Очевидно, что такие соотношения сил сопротивления возможны только в аварийной ситуации, что в расчет брать не будем. Данные табл.1 дают ответ на вопрос о том, чем это можно объяснить. Из строки «РазнFпродК1,К4» и строк со значениями поперечных сил на колесах К1, К2, К3, К4, видно, что каждая из 4-х поперечных сил примерно в 40 раз больше разности продольных сил на приводных колесах. Это говорит о том, что препятствующий развороту крана момент создается почти исключительно поперечными силами, а аналогичный момент, создаваемый двигателями, строка «ДоляМдв», незначителен.
На основе данных табл. 1 построены графики изменения относительной скорости разворота крана и сил взаимодействия колес с рельсами в функции коэффициента сил сопротивления левой стороны крана, приведенные на рисунке 2.
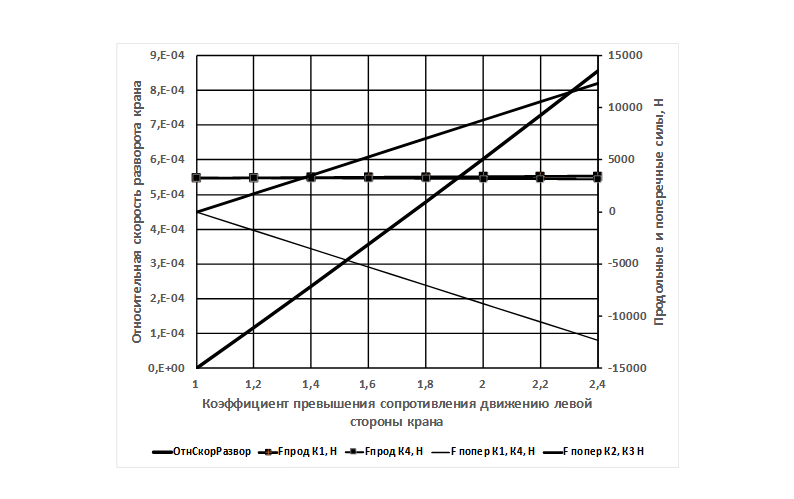
Рисунок 2. Изменение продольных и поперечных сил на контакте колес с рельсами и относительной скорости разворота крана в функции коэффициента сил сопротивления движению левой стороны крана.
Как видно из графиков все зависимости линейные, что говорит о том, что движение крана происходит при соотношении сил, соответствующих практически линейному участку зависимости между силами и относительными скоростями упругого скольжения колес. Линии, соответствующие изменениям продольных сил, передаваемых через контакты ведущих колес, практически сливаются в одну, что наглядно подтверждает мизерность создаваемого ими момента. Максимальная относительная скорость перекоса крана по графику составляет 0,00086 при коэффициенте сил сопротивления левой стороны 2,4 и отрицательных силах сопротивления (движущих силах) правой стороны.
Очевидно, что так различаться как силы сопротивления, так и механические характеристики двигателей одного типоразмера не могут.
В разделе 12 «Допустимые отклонения» действующего стандарта «Машины электрические вращающиеся. Часть 1.Номинальные значения параметров и эксплуатационные характеристики.» [9] имеется один пункт 8а, относящийся к механической характеристике - «скольжения асинхронных двигателей мощностью 1 кВт и более». В нем допускаемая величина отклонения определена в ±20% от скольжения. При номинальном скольжении 5% разность скоростей вращения независимых двигателей в самом худшем случае составит 2%. Поскольку в данном случае двигатели взаимосвязаны металлоконструкцией и не могут вращаться независимо, то произойдет выравнивание скоростей за счет изменения крутящих моментов. При жесткости механической характеристики 0,1 разность моментов составит порядка 20%, а, как видно из графика рис.2, соответствующая этой разнице относительная скорость перекоса крана ~ 8Е-05, что можно не принимать во внимание.
Следовательно, предположение о том, что различия сил сопротивления движению и механических характеристик двигателей играют значимую роль в появлении перекоса крана при установившемся движении, не подтверждается. Также малозначимыми являются и небольшие различия в номинальных скоростях вращения валов двигателей при номинальном моменте и, следовательно, небольшие различия диаметров приводных колес, вплоть до единиц процентов, что эквивалентно различию моментов двигателей на соответствующее число десятков процентов. Эти результаты согласуются с выводами ранее проведенной работы по приближенному анализу свободного движения мостового крана с раздельным приводом [10].
На данной модели также было проверено влияние коэффициента сцепления колеса с рельсом на относительную скорость перекоса крана при различных соотношениях сил сопротивления, или, что то же самое, движущих сил . По результатам были построены графики, приведенные на рисунке 3.
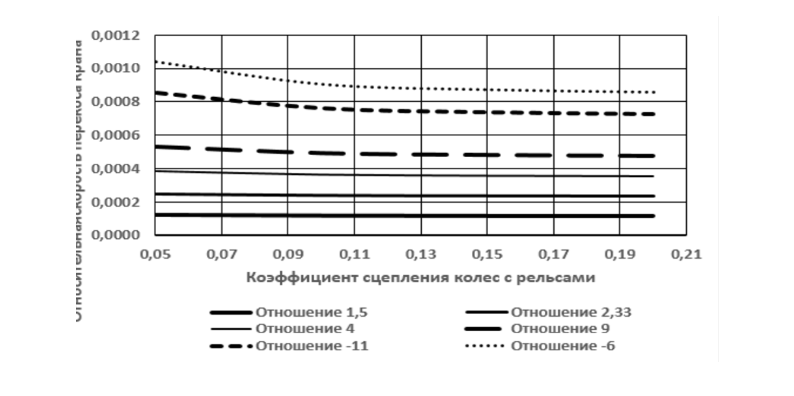
Рисунок 3. Изменение относительной скорости перекоса крана в функции коэффициента сцепления колеса и рельса при различных отношениях сил сопротивленияпо разные стороны крана.
Из графиков видно, что при установившемся движении крана изменения величины коэффициента сцепления от 0,2 до 0,05 при соотношении моментов сопротивлений движению 1,5 и 2.33 не оказывают заметного влияния на скорость его перекоса. При отношении моментов 4 и значениях коэффициента сцепления менее 0,1 начинает проявляться возрастание скорости. Значимым это явление становится только тогда, когда один из моментов меняет знак. Это говорит о том, что контакт не сильно нагружен силами скольжения и изменения условий на контакте не оказывают влияния на перекос крана при его установившемся движении. Кроме того, это подтверждает правомерность предположения о жесткости рельсового пути так как если нет перехода к трению скольжения на головке рельса, то нет его и на подошве и, следовательно, рельсовый путь не деформируется (рельсы не сдвигаются).
Однако в режиме ускоренного движения крана и при управлении его движением путем регулирования развиваемых двигателями моментов, нагруженность контакта возрастает и при коэффициентах сцепления менее 0,1 возможен переход к трению скольжения.
Далее рассмотрим процесс свободного движения данного крана с постоянной скоростью со смещенной с оси пролета тележкой, считая, что колеса не имеют перекосов. При наличии перекосов колес вопрос следует рассмотреть отдельно.
Смещение тележки с оси пролета перераспределяет нагрузки на колеса правой и левой стороны крана, а также силы сопротивления движению и нарушает их симметрию. Для данного крана изменение соотношения нагрузок при смешении тележки представлено на графике, рисунок 4. При этом предполагается, что изначально колеса правой и левой стороны можно считать нагружеными одинаково.
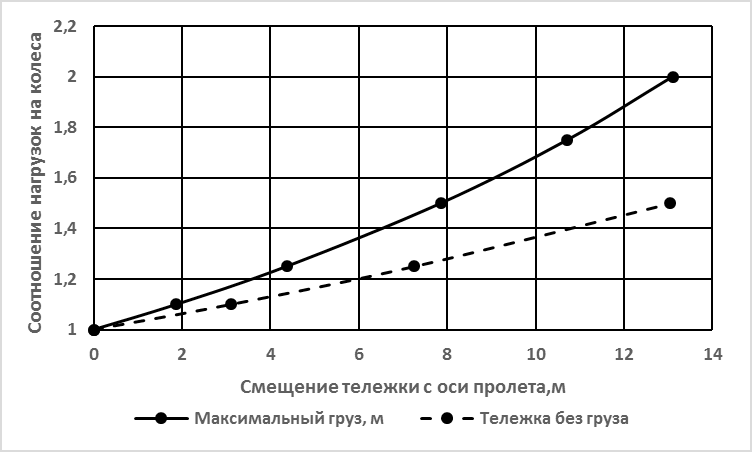
Рисунок 4. Изменение соотношения нагрузок на колеса при смещении тележки с оси пролета
Как видно из рис. 4, наибольшее соотношение нагрузок на колеса для тележки с максимальным грузом, равно 2, а без груза – 1,5. Это небольшие величины, однако для других кранов мостового типа, например, козловых, это соотношение может достигать значительно больших величин.
При моделировании задавались соотношениями нагрузок на колеса правой и левой сторон крана от 1 до максимального значения. Рассматривали два варианта: тележка без груза; тележка с максимальным грузом. Затем определяли величины скольжений и сил, при которых выполняются условия равновесия крана. Результаты моделирования движения крана при смещении тележки с грузом к правой опоре представлены в таблице 2.
| Смещение,м | 0 | 1,87 | 4,37 | 7,86 | 10,72 | 13,10 |
| СоотнНагр | 1 | 1,1 | 1,25 | 1,5 | 1,75 | 2,0 |
| ВертНагрК1,К2 Н | 435073,5 | 414356 | 386732 | 348059 | 316417 | 290049 |
| ВертНагрК3,К4 Н | 435073,5 | 455791 | 483415 | 522088 | 553730 | 580098 |
| СкорПродСкК4 | -9,0E-05 | -9,0E-05 | -9,0E-05 | -8,98E-05 | -8,97E-05 | -9,0E-05 |
| СкорПродСкК1 | -9,0E-05 | -9,0E-05 | -9,1E-05 | -9,10E-05 | -9,14E-05 | -9,2E-05 |
| СкорПопСкОсиК2К3 | 0,00 | -1,4E-05 | -3,2E-05 | -5,85E-05 | -8,00E-05 | -9,8E-05 |
| СкорПопСкОсиК1К4 | 0,00 | 1,4E-05 | 3,3E-05 | 5,90E-05 | 8,05E-05 | 9,9E-05 |
| ОтнСкорПерекоса | 0,00 | 2,8E-05 | 6,5E-05 | 1,2E-04 | 1,6E-04 | 2,0E-04 |
| Fпрод К1, Н | 3262,0 | 3266,5 | 3273,3 | 3282,9 | 3290,7 | 3297,3 |
| Fпрод К4,Н | 3262,0 | 3256,4 | 3249,6 | 3240,0 | 3232,2 | 3225,6 |
| F попер К1, Н | 0,00 | -420,4 | -981,8 | -1766,8 | -2409,0 | -2944,1 |
| F попер К2, Н | 0,00 | 420,9 | 981,3 | 1766,5 | 2408,7 | 2943,9 |
| F попер К3, Н | 0,00 | 420,9 | 981,3 | 1766,5 | 2408,7 | 2943,9 |
| F попер К4, Н | 0,00 | -420,4 | -981,9 | -1767,1 | -2409,5 | -2944,7 |
Данные табл. 2 показывают, что смещение тележки с грузом с оси пролета оказывает некоторое влияние на скорость перекоса крана при соотношении нагрузок на опоры 1,5 и более. Это, пожалуй, второй по значимости фактор после перекоса колес, и не гипотетический, а реальный, хотя и значительно менее значимый. Вопрос о его учете необходимо решать в каждом случае в зависимости от параметров крана и технологического цикла, в который он включен.
Заключение. Результаты моделирования движения мостового крана не противоречивы и построенная на основе предложенных принципов модель в достаточной степени адекватна натуре.
Как показывают полученные результаты, на данном этапе при рассмотрении свободного установившегося движения работающих в закрытых помещениях мостовых кранов общего назначения можно вообще не учитывать все прочие возможные причины их перекоса, кроме монтажного или установочного перекоса колес.
Необходимость их учета может появиться не ранее того момента, когда относительные установочные перекосы колес удастся уменьшить до величин порядка 2Е-4, при условии, что требуемая стойкость колес по ребордам не будет достигнута.
Влияние рассмотренных выше факторов на движение козловых кранов может быть оценено по результатам моделирования движения конкретных кранов.
1. Крановые панели и системы управления кранами. Автоматическое позиционирование моста и тележки. URL: https://dvesta.com/technical-solutions/spetsialnye-funktsii-dlya-kranov-v-sostave-sistem-upravleniya/avtomaticheskoe-pozitsionirovanie-mosta-i-telezhki/. (дата обращения 14.02.2021.)
2. Поликарпов Ю.В. Кинематика движения четырехколесной ходовой тележки грузоподъемного крана. // Подъемно-транспортная техника, №3, 2004 с. 47- 55.
3. Поликарпов, Ю.В. Обоснование выбора математической модели движения грузоподъемного крана по рельсовому пути./Ю.В. Поликарпов, Ю.Н. Диденко// Вісник ДДМА. – 2011, – №4 (25). С. 240 – 244.
4. Балашов В.П. Раздельный привод в механизмах передвижения мостовых кранов / В.П. Балашов. – Москва : б.и., 1959. – 122 с. – Режим доступа: по подписке. – URL: https://biblioclub.ru/index.php?page=book&id=210865 (Дата обращения: 24.02.2021).
5. Стрельцов С.В., Рыжиков В.А Снижение негативного влияния перекосов на состояние ходовой части крана. URL: https://na-journal.ru/4-2012-tehnicheskie-nauki/166-snizhenie-negativnogo-vlijanija-perekosov-na-sostojanie-hodovoj-chasti-krana. (Дата обращения 20.02.2021.)
6. Иванов А.А. Причины износа реборд ходовых колес мостовых кранов. // Промышленная и экологическая безопасность, охрана труда № 7 (104) 2015 [Электронный ресурс] сайт. - URL https://prominf.ru/article/prichiny-iznosa-rebord-hodovyh-koles-mostovyh-kranov (Дата обращения: 20.02.2021)
7. Офий В. В. К вопросу о перекосе ходовых колес мостовых кранов / В. В. Офий, П. П. Горбакова // Вестник Нац. техн. ун-та "ХПИ" : сб. науч. тр. Темат. вып. : Новые решения в современных технологиях. – Харьков : НТУ "ХПИ", 2008. – № 12. – С. 64-69.
8. Дулев И.А. Прикладной метод определения зависимостей между усилием и скольжением для крановых ходовых колес – Известия Вузов, Машиностроение, №10, 1988 – с. 100 – 104.
9. ГОСТ IEC 60034-1-2014 Машины электрические вращающиеся. Часть 1. Номинальные значения параметров и эксплуатационные характеристики. URL http://docs.cntd.ru/document/1200120650. (Дата обращения 20,02,2021)
10. Поликарпов Ю.В. Установившееся движение грузоподъемного крана на цилиндрических колесах с раздельным приводом по рельсовому пути/ Ю.В. Поликарпов // Вестник ДГМА. – 2007. – № 3(9) . – С. 202 – 207.
Рецензии:
1.04.2021, 11:55 Петрухин Геннадий Михайлович
Рецензия: Известные способы повышения срока службы колес мостовых кранов, в частности, применение замкнутых систем автоматического управления их электроприводами, приводят к повышению затрат при их внедрении и эксплуатации. В статье приводятся результаты исследований по выявлению значимых причин появления условий повышенного износа колес. Предлагаются новые принципы построения математической модели, учитывающей упругие скольжения колес. По содержания и форме представления статья может быть рекомендована к опубликованию.
Комментарии пользователей:
Оставить комментарий
|
E-mail: sci@sci-article.ru
©2013-2023 Электронный периодический научный журнал SCI-ARTICLE.RU Любое использование размещённых на сайте журнала статей и материалов возможно только с обязательной активной ссылкой на сайт журнала «SCI-ARTICLE.RU».
|
Вверх